
Introduction - the struggle continues
This is the second part (or a second edition) of the blog post series regarding
ZarhusBMC and porting OpenBMC to the Supermicro x11ssh platform. In this
blog post, I’ll share the progress we made since the last time, where we
currently stand, and what the future plans are for the platform.
Up to speed
If you want to get up to speed with the first ZarhusBMC and x11ssh related
blog post, here’s a link for your convenience:
blog.3mdeb.com/2025/2025-04-28-zarhusbmc/1
In the first blog post, I provided a general overview of what OpenBMC is and the
role it takes in the world of proprietary, unauditable solutions. I also
showcased the effort it took to run custom-built OpenBMC on the x11ssh
platform.
I have since managed to build OpenBMC with serial console access. During the Last Zarhus Developers meetup2, I showcased that we were able to access the web UI of OpenBMC, but because I compiled the solution without user management setup, we could not access the admin console.
The fact that software is running does not necessarily mean it is working. …and this is where we start this blog post.
The second encounter
Not long after the presentation, I found myself working on porting OpenBMC once again. I have recompiled the custom OpenBMC, but this time, instead of disabling user management, I disabled logging (who would need that, right?) and managed to enter the OpenBMC admin panel via Web UI.
…but it looks a bit empty, innit?
The real issue
While the system (OpenBMC) is running, there is no communication with the host, and the task was to establish why.
TL;DR: The issue narrows down to two major service failing as shown in the below snippet (I’m ignoring LEDs for now).
|
|
The ipmi-kcs is a main service that controls communication with the host. The
IPMI (Intelligent Platform Management Interface) is a protocol for independent
hardware management, while the KCS (Keyboard Controller Style) is a transport
layer between the host and the BMC for communication. This component is crucial
for OpenBMC to work properly, but I’ll share the reason why it isn’t working
later in this post.
The second Control.Power service, as the name suggests, is responsible for
controlling platform power states. It too is a crucial component, and due to it
not working, we could not even control the host power state from the Web-UI.
The issue with KCS
Let’s briefly talk about KCS origins. As discussed earlier, KCS, or “Keyboard Controller Style,” is a register-based interface defined by a set of bit-level operations. Its design traces back to the Intel 8742 microcontroller originated in the 70s, which served as the keyboard controller in legacy computers3. The interface was later repurposed for system management tasks, including IPMI, and became widespread in BMC solutions due to its simplicity, byte-oriented protocol, and broad hardware compatibility4.
The BMC firmware is essentially just another ARM Linux distribution. Like on most ARM-based systems, hardware is described via the device tree, which includes physical interfaces such as KCS. The device tree structures can come from various sources: delivered by SoC Vendors, created based on schematics and data sheets, or made by reverse engineering. It is not something one would want to create from the beginning.
The fact is, the dts/dtsi files for Aspeed AST2400 embedded into x11ssh
motherboard do not have the KCS interfaces defined. This is how the KCS
definition could look.
|
|
Source: linux-aspeed5
This definition comes from a newer, Aspeed AST2500 device structure. Since we’re missing this definition, the KCS device is not created, and thus the service fails.
|
|
The good news, however, is that these (KCS) addresses seem to be standardized between various Aspeed models and can also be found in the SoC datasheet. I just haven’t had a chance to test if adding it would work, but I don’t see why it wouldn’t.
GPIO issue
The second issue is also related to the device tree structure and missing definitions, but this case is different. While multiple vendors can use the same BMC SoC, and each deployment will use the same set of KCS addresses, it’s up to the OEM to decide how to “wire up” the BMC. This makes each deployment specific.
This is important as BMCs feature a set of GPIO pins that probe or set up various endpoints on the motherboard. This might seem like it isn’t really an issue. How many GPIOs can such a BMC have, right?
The answer is 216 (as stated in documentation), which is too high a number for a trial-and-error approach. For base operation, we should not require a full subset of pins, but still, we are missing definitions that are required for power state managers.
|
|
Note: I later switched to x86 power control.
The GPIO definitions for x11ssh for
u-bmc6,
HardenedVault’s attempt7,
or our attempts, all use the work of Keno Fisher8
for those definitions. While the subset for pins might have been sufficient for
u-bmc in the past (the x11ssh development has been abandoned), it is not
sufficient for now. I’ve got to admit, it’s still a mystery to me how Keno
managed to come up with those definitions; however, I’ll touch on one possible
approach later in this post.
The effort
The “damage control” isn’t the only thing we were focusing on since the last time. Although we have not yet been successful in addressing the previously mentioned issues, as many other projects come in the way, we still managed to progress a lot thanks to the community effort. Let’s discuss what we managed to achieve.
Open discussions
Let’s start with something different, non-technical. We’ve launched ZarhusBMC discussions9, where anyone interested in the project can check out what we are currently working on in the BMC space. In true open-source spirit, we want to be as transparent as possible, and we encourage taking an active part in the discussion.
We’ve already hosted two such discussions. These aim for these to be a more streamlined form of live coding. Every time we’re working on something, a discussion is made, and we update statuses as we go. This has two upsides that are partially related. First of all, we’re closer to the community, and secondly, in case we require any 3rd party or community input, the results and steps we tried are in the commonplace and publicly available.
Speaking of commonplace, we’ve chosen GitHub discussions as a place to host these. True, you’ll still need an account to take part in the discussion, but at least the information is publicly accessible.
As a side note, being so open also has its downsides. One being the free (as in free will) content is a “free real estate10” for AI bot farms, which we already had a taste of11 😉.
{kind=link}
Probing stock firmware p. I - QEMU, binwalk, gdb, and stock firmware sources
In order to resolve the previously mentioned issues, mainly the GPIO pins definitions, we decided to give a stock firmware probing a chance. The attempt can be summarized in 4 steps:
Disassembling the firmware image
First, we decided to have a go at disassembling the firmware binary. The
binwalk utility has been used in the process, and it successfully extracted
the “partition layout”. This way, we could go through most of the files
comfortably. We were hoping we could find device tree binaries (DTBs) for a
further attempt at decompilation. Unfortunately, due to the age of the Linux
kernel used, it was not possible, but more on that later.
Booting stock firmware under QEMU
- As a second take, we’ve “booted” the stock firmware under QEMU, same as we
previously did with our custom-built OpenBMC image. This gave us a peek inside
the running system, but due to the missing hardware, many services were failing,
thus it was hard to assess how reliable scoping would be. We were, however, able
to gain some insight this way: the firmware runs on an ancient, custom Linux
kernel version
2.6.28.19, there was no/proc/devicetreenor asysfsinterface for controlling GPIOs. …and this brings us to the next point.
ATAGs
- Due to the age of the kernel, we suspected the Linux kernel uses a
pre-device-tree mechanism known as
ATAGs12.
ATAGs provide only basic platform information, so the running image can verify
it, and all the hardware support is built directly into the “kernel”. We used
gdbto verify that’s indeed the case.
|
|
|
|
The r2 register confirms the presence of the ATAG mechanism.
Sources
Our last chance at that moment was scoping the source files for the stock firmware. How obtainable are these, you might ask? As previously stated, the BMC firmware is basically yet another ARM Linux distribution, and the Linux GPL license requires publishing the source code of the solution. Moreover, the GPL is a “viral” license. If you incorporate part of a GPL solution into your software, it must be licensed under the same license. This ensures the sources must be made available to binary recipients (customers), and sometimes even to any third party, depending on how the vendor complies with the license. Corporations might try to comply with “any 3rd party” requirement, but use other “developer access prevention methods” (joke) like burying the sources deep into the tree of the download page so they’re not indexed by search engines and are a bit harder to find. Luckily, we managed to find the sources for stock BMC firmware13 on our own. Unfortunately, all the interesting stuff in the form of proprietary kernel modules in said repo is already precompiled, thus the information cannot be easily extracted. Generally, the approach of supplying prebuilt kernel modules is a gray zone. It is discouraged, but it is acceptable14.
Notice me senpai - accessing UART on stock firmware
Since we temporarily ran out of easy-to-execute ideas for probing the stock firmware via hardware emulation, we decided to play with a stock firmware running on real hardware. You’d be right to doubt it’s that easy, and you’d be correct. Thankfully, due to community effort, this was much easier.
We wanted to gain UART access to the BMC. We knew this was possible, as such a
successful attempt has been made in the past. Keno Fisher, the same guy who
did the majority of the work for running U-BMC on x11ssh platform, did
a blog post15
in which he described finding the UART TX (transmit) pin by probing the board.
This gave him one-way (read) access to BMC UART, but for our case, that wasn’t
enough.
Thankfully, shortly after our previous post on ZarhusBMC was published,
Tim Ansell16 reached out offering the Gerber files
for the x11ssh platform. These are publicly available on
his repo17.
The combination of Keno’s and Tim’s work allowed us to trace the pin Keno
found back to the Aspeed SoC, figure out the corresponding RX (receive) pin
with the help of
AST240018
documentation, we managed to find and trace where said pin ends up on the
motherboard.
The trace ended up on an unpopulated pad, and then it was a matter of soldering jumper wires to the motherboard.
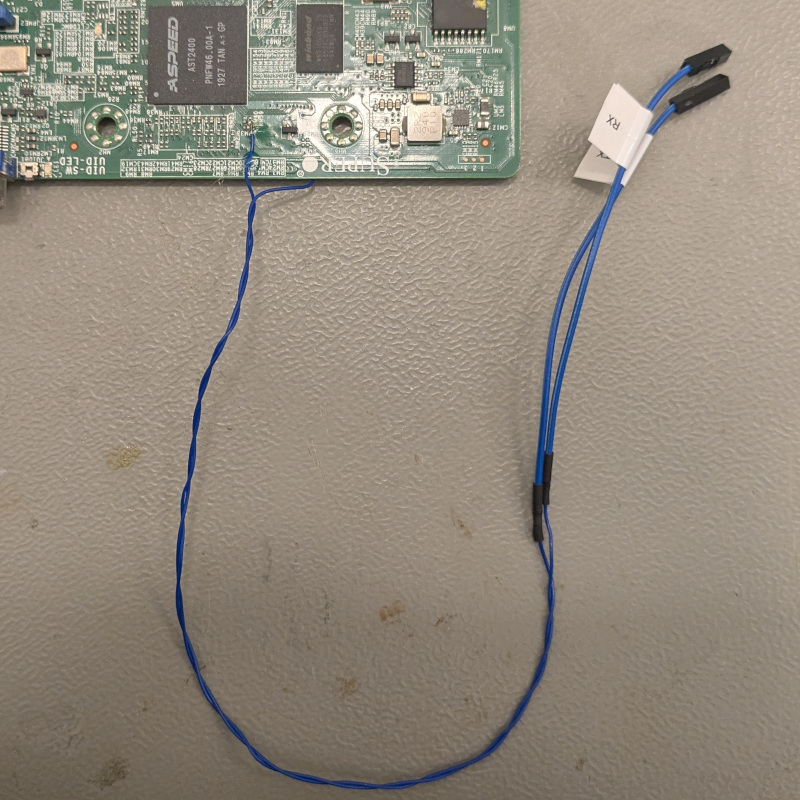
Then, a one “hardware-flow control disabling” later, and bada bing bada boom, we’ve got the UART access to the stock firmware running on real hardware.

The cool part is this is the first public discussion we’ve shared and got massive positive feedback, check out the discussion19 to learn more. What’s even cooler is that Keno himself responded on the Hacker News thread20 (thus the title of that subsection 😅).
Probing stock firmware p. II - hardware
The last thing we’ve managed to do until other projects came in was perform scoping of stock firmware, but this time on a firmware running on real hardware.
We’ve confirmed that, even with all services starting properly, we did not have
access to any of the interfaces (like sysfs) for controlling or probing the
GPIO pins. The precompiled binaries were also checked if they could be of any
use, but besides those clearly marked as “tool”, most of them just ended up
segfaulting, as I suppose they expect some kind of input stream.
What we have managed to do, though, is learning how to probe GPIOs. The developers conveniently left us the devmem binary. This, along with the documentation, enabled us to take a peek at the GPIO registers (direction, state, etc.). By putting the host into different states (on, off), we could observe the register values getting changed.
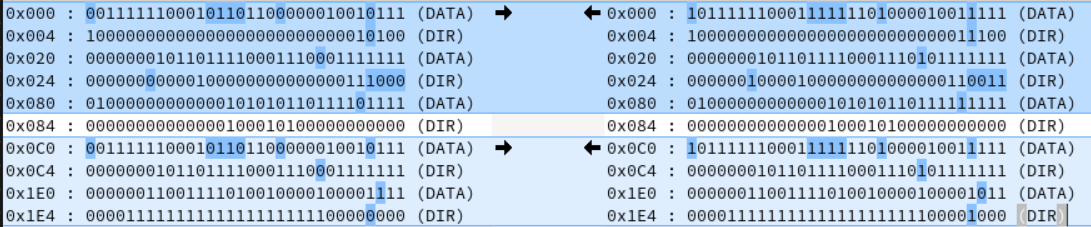
The output is kind of useful. What it allows us to do is, instead of tracing back all 216 GPIOs, we can reduce this number to the number of bits that got flipped during the state change. There’s a high possibility the “Power OK” pin is among those that got flipped. What’s left is correlating those register values with the physical pin locations on the SoC with the help of the previously mentioned data sheet, tracing them with the Gerber files we’ve got, and understanding their role. It is a complex task, but it at least gives some options for further development in this area.
What’s next
Now you should have an idea of where we currently stand with porting OpenBMC
to the x11ssh platform. Having said that…
“I’ve experiments to run. There is research to be done” - GLaDOS
Jokes aside, we’ve got plenty of ideas on the next steps. We still have to
verify the KCS addresses theory, we want to try probing the BMC from the host
side, and we’re thinking of making automated tooling for easier porting of
OpenBMC, but that last one will rather target newer platforms (wink wink).
There’s also a possibility of tracing back the GPIO as we discussed in the last
section, or attempting to inspect what stock firmware tries to “poke” under
QEMU. That last path might have limited possibilities since many components fail
due to missing hardware, but there might still be a limited set of information
worth attempting to extract. There definitely is
an interest
in getting OpenBMC on x11ssh platform running, but it’s just not ready yet. If
you want to keep track of what we’re currently working on, check out
ZarhusBMC discussions pane21,
catch us on Matrix Zarhus Space22,
or for serious offers, drop us an email at contact<at>3mdeb<dot>com.
References and resources
Additional resources:
- Previous ZarhusBMC blogpost
- Last Zarhus meetup
- Incoming Zarhus meetup
- ZarhusBMC discussions
- ZarhusBMC UART thread
- ZarhusBMC stock firmware probing thread
- Keno Fisher
- Tim Ansell
- Keno Fisher’s blog post
- x11ssh Gerbers (Tim Ansell)
- HardenedVault OpenBMC port
- Keno Fisher’s u-bmc port
- AST2400 datasheet
- x11ssh stock firmware sources
- X11ssh stock firmware binary
References:
-
https://cfp.3mdeb.com/zarhus-developers-meetup-0x1-2025/talk/WQC7LP/ ↩︎
-
https://www.dmtf.org/sites/default/files/standards/documents/DSP0254_1.0.0.pdf ↩︎
-
https://github.com/AMDESE/linux-aspeed/blob/integ_sp7/arch/arm/boot/dts/aspeed/aspeed-g5.dtsi#L474 ↩︎
-
https://github.com/osresearch/u-bmc/blob/kf/x11/platform/supermicro-x11ssh-f/pkg/gpio/platform.go ↩︎
-
https://github.com/hardenedvault/openbmc/blob/x11ssh-f/meta-supermicro/meta-x11ssh/recipes-kernel/linux/linux-aspeed/0001-add-aspeed-bmc-supermicro-x11ssh-dts.patch ↩︎
-
https://stackoverflow.com/questions/21014920/arm-linux-atags-vs-device-tree ↩︎
-
https://www.supermicro.com/wdl/GPL/SMT/X10_GPL_Release_20150819.tar.gz ↩︎
-
http://linuxmafia.com/faq/Kernel/proprietary-kernel-modules.html ↩︎
-
https://github.com/Keno/bmcnonsense/blob/master/blog/03-serial2.md ↩︎
-
https://gitcode.com/Open-source-documentation-tutorial/69bbb ↩︎
